モータードライブの計測技術
1.三相交流電力計測の基礎
単相交流電圧
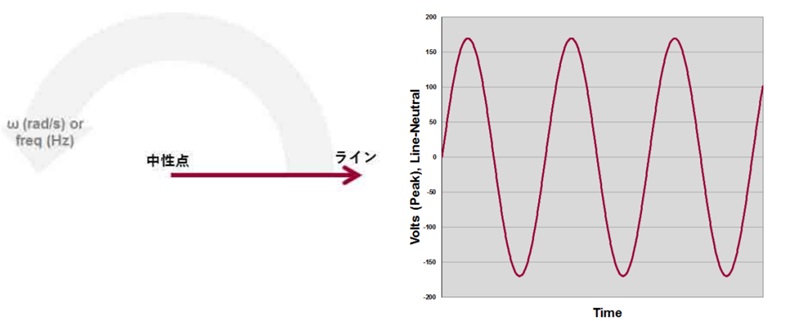
まず最初に単相交流電圧(正弦波)を考えます。
この単相交流電圧はRMS電圧として単純化することが出来ますが、実際には一定の大きさを持つ回転ベクトルからなり、その大きさは正弦波状に変化します。
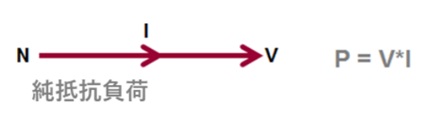
もしこの単相交流電圧を純抵抗負荷に接続すれば電流と電圧の位相は同じであり電力は単純な電圧と電流の積から求めることが出来ます。
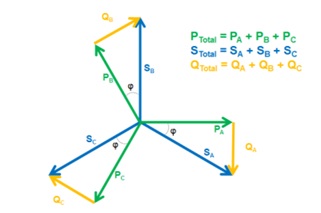
純抵抗負荷でない場合、電流と電圧には位相差が発生し、電力の計算は実効電力、皮相電力、無効電力の3つの成分に分けて考えることになります。
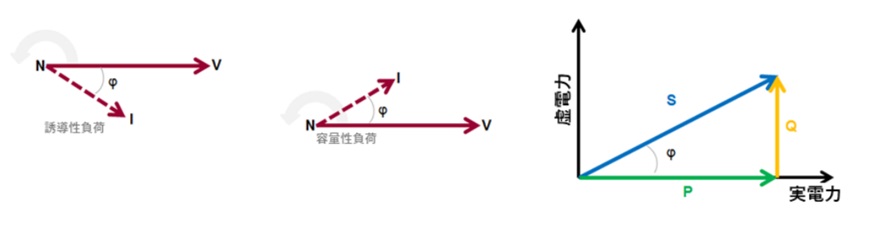
三相システムにおいては3つの電力(実効、無効、皮相)は各相で個別に計算し足し合わせる必要があります。
時間軸でみた電圧、電流波形は例えばこのような関係になります。
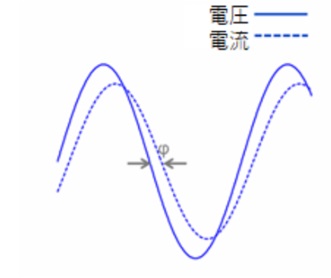
この場合の波形は正弦波交流ですので、電流と電圧の位相差は単純に求めることが出来ます。位相差がわかれば実効、皮相、無効電力の算出も容易です。
モーター駆動波形が正弦波であった時代にはこの様に電圧、電流波形から求めた位相差を元にモーター駆動システムの各電力値を算出することができました。
2.実際の三相インバータ波形の例
しかしながら、現在では多くの場合負荷は抵抗性ではなく、かつ非線形です。従って電圧または電流波形は位相がずれて歪みます。つまり、歪んだ波形は多くの異なる周波数成分からなり、各高調波成分は各々特定の位相角をもっているので、単一周波数の電圧と電流の正弦波から位相角を計測するという手法は、単純に適用することができ ません。
最近の(ドライブ、もしくはインバータと呼ばれる)電力変換システムにおけるPWM出力波形の例を示します。この例はブラシレスDCモーターの3相電圧(Line-Neutral)、3相電流の捕捉波形です。
上段が電圧波形、下段が電流波形、左側の各波形をズームしたのが右側の波形になっています。これを元に位相を求め、各電力値を計算することが困難なことがわかります。
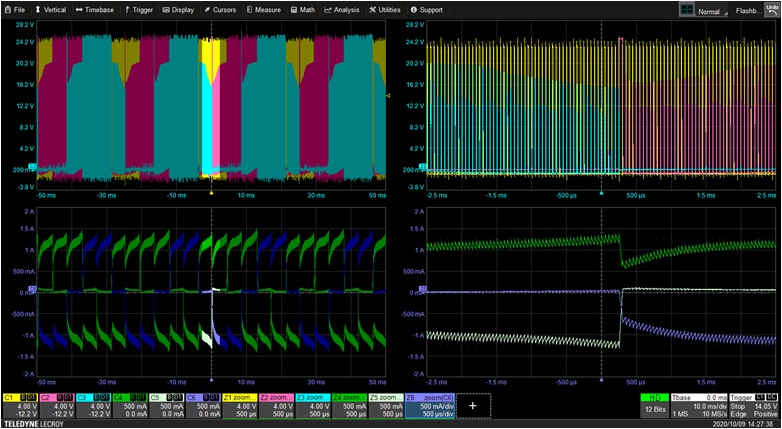
デジタルオシロスコープでサンプリングされた電圧波形、電流波形を掛け算演算することで瞬時パワーの波形を得ることが出来ますが、それを見ればパワートレンド(パワー値の時間変動)がわかるかと言えばそう単純ではありません。特に昨今のPWM変調されたインバータ出力でこの瞬時パワートレースを計算してもその結果は非常に煩雑で定量的解釈もできないものとなってしまいます。(下図右側の赤いトレース:各相の瞬時パワー波形を加算したトレース)
従って、デジタル・サンプリングを基にした異なる手法を用いる必要があります。この手法は、広帯域で高分解能の A/D変換器(デジタル・オシロスコープやパワーアナライザなど)の普及した現在では、非常に一般的です。波形をデジタル・サンプリングした後は、数学的に計算するのは簡単です。この手法は波形が純粋な正弦波であっても、歪んだ正弦波であっても、パルス幅変調されていても、それ以外であっても数学的に正しいもの です。この手法は次のセクションで説明します。
3.デジタルサンプリングによる電力計算
①まず波形をデジタルサンプリングします。
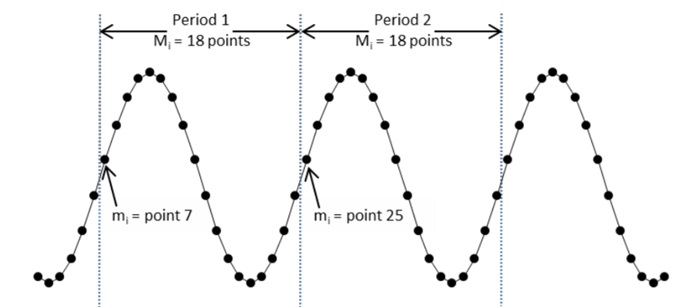
②そして得られた波形を周期決定します。
ここで各周期のインデックスをi、各周期内のインデックスをjとします。
③下表の計算式に従い各パワー値を算出します。
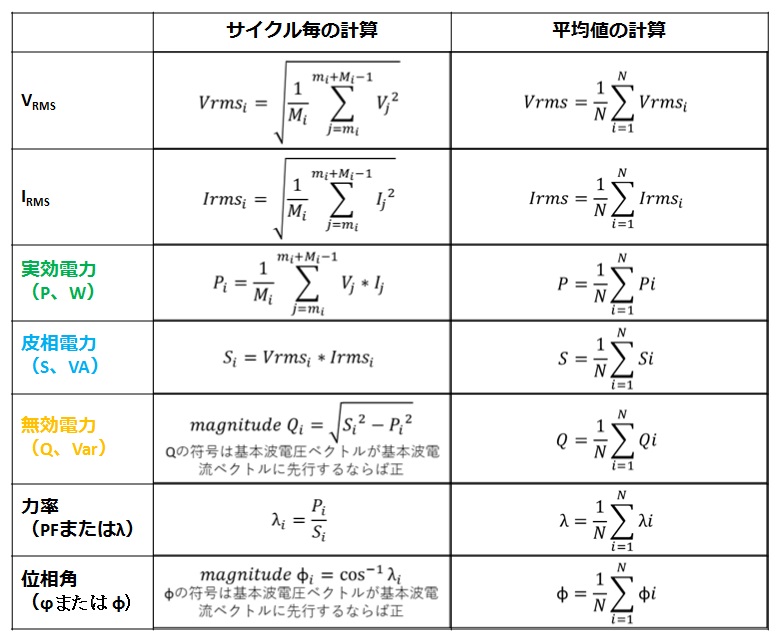
各瞬時電圧、瞬時電流からRMS値がわかり、ここから皮相電力が求まります。いっぽう瞬時電力の1周期合計値から実行電力が求まります。この2つの電力値から無効電力および結果として力率および位相を計算することが可能となります。
ここでは説明のために正弦波としていますが、この計算アルゴリズムはすべての波形のケースについて適用することが出来ます。PWM波形においてもLPFを適用することで、例えばモーター回転周期に相当する周期を決定して計算を行います。
この方法はパワーアナライザ機器の内部でも行われています。しかしながら周期決定にPLLを用いてハードウェア的に行っているため周期変動のある波形ではなく安定した周期の波形(例:安定回転状態のモーター駆動波形)に制限され、動的な変動状態下の測定・解析はできません。パワーアナライザ機器ではこうして得られた各周期でのパワー値を平均し画面上に数値で表示を行います。
オシロスコープをベースとした解析では波形捕捉後の後処理で周期決定を行うことが出来、周期決定波形にLPFを適用したり、ゼロクロス点を求める際のヒステリシスを調整したりすることも自由にできるため、周期が大きく変化している波形においても解析を行うことが出来ます。
各周期ごとのパワー値が得られますのでこれを使えば時間変動を画面上に描画することが可能になります。例えばスタートアップ時のパワー値の変動をプロットすることも、異常動作時の解析を行うことも可能となります。
テレダイン・レクロイでは12ビット、8チャンネルモデルのオシロスコープ(WaveRunner 8000HD)に解析ソフトウェアをバンドルしたモーター・ドライブ・アナライザMDA8000HDシリーズを提供しています。
周期毎のパワー値、および機械的パラメータ(回転スピード、トルク)の時間変動プロットは、オシロスコープに組み込まれた専用解析ソフトウェアで行われ波形捕捉後すぐに画面上に表示されます。
4.オシロスコープを使った動的モーター駆動波形の解析例
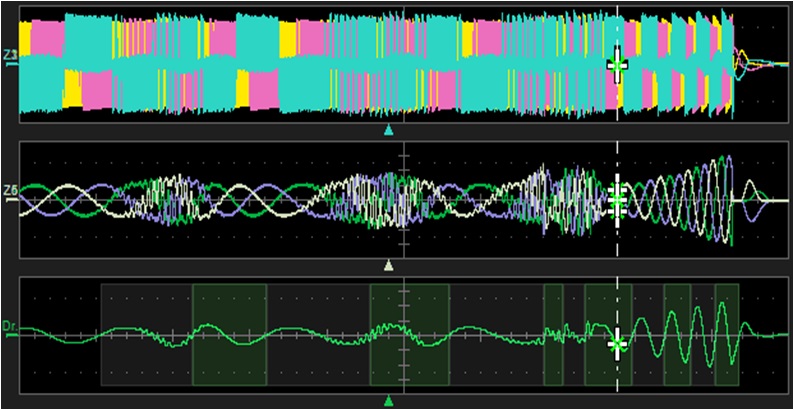
これは3相モーター駆動波形とその解析の例です。上段は3相それぞれのPWM電圧波形、中段は電流波形です。
途中回転が乱れている異常動作を示している部分があります。徐々に回転スピードがあがり電流振幅が大きくなってゆき画面右端近くでオーバーロードで回転が停止するまでを捕捉しています。
下段は、1つの相の電流波形を元に周期決定した結果を示しています。ゼロクロス点の決定に影響する波形の乱れ部分をLPFを適用しある程度平滑化、ヒステリシスも調整し適切に周期決定が出来ているのを視覚的に確認するために、決定した周期を表示する半透明なオーバーレイをオンにしています。
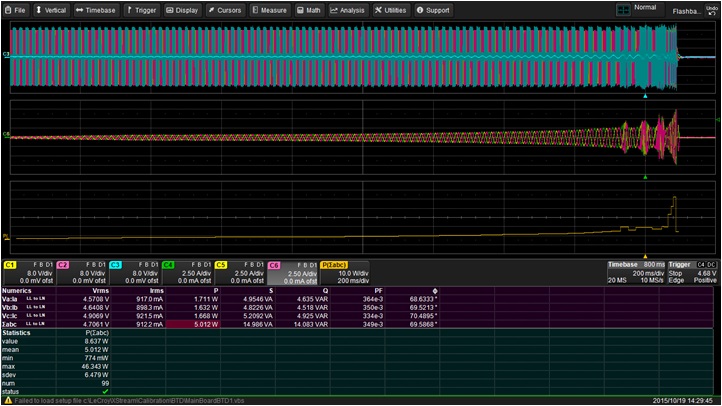
以下の画面は前出の波形の全体を示したものです。周期決定を行った結果を元に、各周期の3相パワー合計値を時間軸にあわせてプロットしたのが下段の黄色のトレースとなっています。
階段状の波形となるのは各周期ごとに1つの値をプロットしているからです。
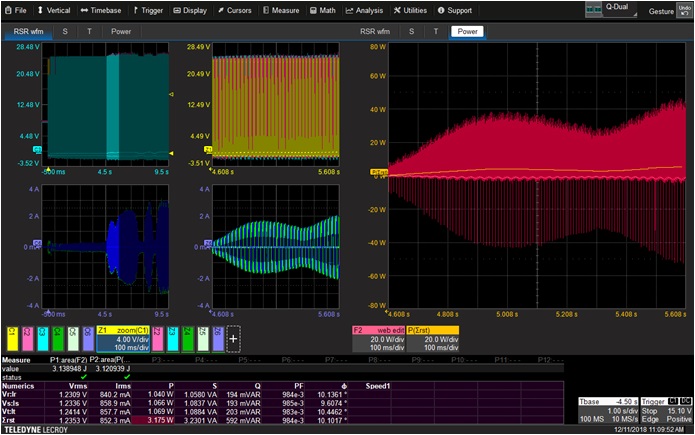
これは単純な例ですが実際に動的に回転スピードが変動している状態での解析を行っています。これはバッテリー駆動の電動工具の動作波形解析例です。

左上がDCバッテリーからの供給電圧と電流波形、右がインバータ出力の電圧と電流波形です。2電力計法を用いて2相分をプロービングして測定を行っています。(残りの1相分はソフトウェアにより自動的に計算で求めます)
左下のグリッドはホール回転センサの出力をロジック入力で読み込んだ波形とそこから換算される回転数のプロットおよびトルクセンサーからのトルク値の時間変動プロット。
右下のグリッドはそれぞれのセクション(DCバス、インバータ、モーター)のパワー値の時間変動プロットとなっており各セクションの効率値もプロットされています。
オシロスコープをベースにした解析では電気パワー、メカニカルパワーの解析の他、余ったアナログチャンネルやロジック入力チャンネルを使って特定のパワーイベントの瞬間における他の回路動作やシリアル通信のやりとりなども同時に並べて相関を解析することも可能となります。高精度ではありますが単機能のパワーアナライザを補完し、強力な解析、デバック能力で開発を迅速に進めることが出来るようになります。
より複雑なシステム解析には2台の8チャンネル、12ビットオシロスコープをシンクロし16チャンネル動作を行うことの出来る機能も有しています。