車の位置を特定するための技術
1.車の位置を特定するための技術
車の位置を特定すると言うと、まず頭に思い浮かぶのはカーナビではないでしょうか?
地図があり、その中に自分の車の位置が特定され、さらに目的地までの所要時間も予測されており、もはや現代人にとっては運転する際になくてはならない存在となっています。
とはいえカーナビでは、実際に走っている道路とはちょっと離れたところを走っているように表示されたり、高速道路と一般道が近い位置にある時に、高速を走行中であるにもかかわらずカーナビでは一般道を走っているように(あるいは逆に)表示されたりすることがあります。
考えてみると、このような間違いがカーナビにおいては許容範囲であるのは、運転の主体が人間であるからであり、間違いは人間が判断して訂正することが期待されています。しかし自動運転レベルが3になると、安全運転に係る監視・対応主体が通常はシステムであるので、車のより正確でかつ外部要因に影響されない位置情報の特定が必要となってきます。
2.自己位置特定技術
自己位置特定技術は主に3つの手法があり、(1)電磁誘導、(2)高精度GPS、(3)高精度3次元地図です。仕組みについて簡単に説明しますと、
(1)電磁誘導
電磁誘導は、事前に道路に電磁誘導線を埋め込み、磁気マーカーを取り付けている車両が道路を走ると場所を特定できます。
(2)高精度GPS
高精度GPSは、衛星から(X,Y,Z座標)の情報を受信し、且つ電子基準点からの補正情報や慣性計測装置を用いて位置精度を補正する方法です。
(3)高精度3次元地図
高精度3次元地図は、事前に高精度3次元地図を作製し、走行車両にカメラやLiDARなどのセンサを取り付け、カメラで取得した情報と地図と照らし合せて位置情報を算出する方法です。
それぞれの手法に課題があり、電磁誘導の場合は、埋設など施設の整備と管理が必要となり適用空間が限られる事で、高精度GPSの場合は、山間部等地理的な要因やトンネル等構造的要因によってGPSを受信できないエリアの存在が課題となります。
また高精度3次元地図の場合は、気象変化によるセンサ性能の低下や高精度地図の整備、精度の維持等が課題となっています。そのため、今後は実際の道路環境に合わせてそれらの技術を使い分けることになるだろうと考えられています。
3.クレアクトが取り扱っているIMUセンサについて
クレアクトが現在取り扱っているSBG社のIMUセンサは、慣性センサとGNSSのデータが統合され、自律型車両にとってGNSS受信が悪い過酷な環境でも、常に信頼できる絶対位置を提供できる優位性を備えています。
フランスパリ郊外に本社を構えるSBG System社は、最先端のMEMS技術に基づく慣性測定ユニット(IMU)、姿勢方位基準システム(AHRS)、GNSS統合した慣性航法システム(INS)を生産しています。
ロール/ピッチの精度が0.1°の小型Ellipse2モデルや同精度0.008°、遅延が少なく高い耐震動性を備えたハイエンドのApogeeモデルを、IP68筐体や組込み用フォームファクタ等、様々なアプリケーションに合わせた豊富なラインナップで用意しています。これらすべてのセンサはマイナス40°からプラス75°までの温度環境で一貫した安定した性能を発揮できます。
前述した通り自動運転アプリケーションにおいては、信頼性の高い位置情報が何より大事なポイントとなりますが、GNSSそのものの位置誤差は常に数メートル、極端な場合は100m以上にもなるため、現在この誤差を補正するため自動運転には高精密測位技術が採用されています。
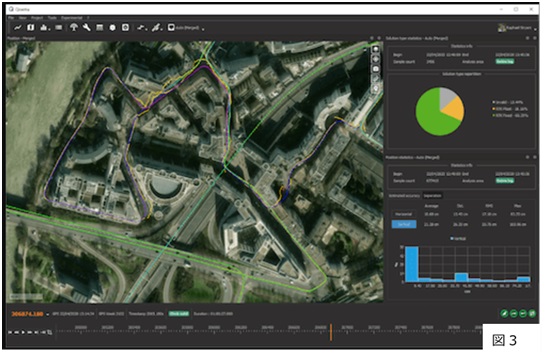
高密度測位にはスタティック測位とキネマテック測位の方法があり、自動運転の場合は、移動する物体の位置を瞬時に~2cmの誤差で計測できるRTK法とPPP法があります。SBG社のIMUとGNSSのソリューションでは、ビルの谷間、橋梁の下などGNSSシグナルを受信しにくい環境になったところでも、IMUセンサで取得した慣性センサとRTK情報をSBG社が独自開発したカルマンフィルタで統合し、より安定した測位情報の提供を可能にしています。
SBG社はこのようなRTK測位を標準機能としてすべてのセンサに実装しており、また、すべての計測データをCAN出力できるため、高精度のデータを変換のプロセス無しで他のシステムに簡単に統合できる優位性を備えています。(SBGリンク)https://www.creact.co.jp/item/measure/imu-ins-ahrs/sbg/sbg-top