自動運転における重大な問題をシミュレーションで検出する技術を開発
~問題が発生するかを探り、起こりうる問題だけを効率的に自動探索~
情報・システム研究機構 国立情報学研究所( N I Iエヌアイアイ、所長:喜連川 優、東京都千代田区)のアーキテクチャ科学研究系准教授 石川いしかわ 冬樹ふゆきらの研究チームは、科学技術振興機構(JST、理事長:濵口 道成、東京都千代田区)の戦略的創造研究推進事業 ERATOエラトー 蓮尾メタ数理システムデザインプロジェクト(ERATO MMSD、研究総括:NII アーキテクチャ科学研究系准教授 蓮尾 一郎)のもと、自動運転システムのシミュレーションにおいて、急加速や急ハンドルが起きているなど事故につながるような複合的で重大な問題が発生するシミュレーションシナリオを効率よく自動で見つける技術を開発しました。本手法では、シミュレーションの試行を繰り返す中で、追い越しや右折などのシナリオごとに起こりえない問題を見つけて不要なシミュレーション試行を除外することで、重大な問題が起きるような本当に重要なシナリオ、例えばあまりにも強い加速と急ハンドルが同時に発生するなどの状況を効率的に見つけ出すことができます。本研究成果は、ソフトウェア工学における自動化についてのフラッグシップ国際会議 ASE 2021で2021 年 11 月 16 日(オーストラリア時間)に発表されます。
【背景】
自動車の自動運転機能や運転支援機能に対する社会の期待を受け、特定の状況では運転手が注意を払わなくてもよい「レベル 3」と呼ばれる自動運転機能を備えた車種も現れつつあります。しかし、現在取り組まれている自動運転は、高速道路の渋滞時や、ある定められたルートなどに限られています。そのため、市街地など交通状況の変化が大きな環境での自動運転の実用化には、さらなる安全性・信頼性の向上が求められます。これを受けて、ERATO MMSDプロジェクトでは、ますます重要となるシミュレーションの活用において、これまでに自車に起因して衝突など危険な状況が発生するシナリオを探索・検出する技術や、検出した衝突に対して要因を説明する技術、検出した衝突を防ぐように自動運転車の振る舞いを修正する技術、衝突などはないが強い加速が起きるなど特徴的な運転行動が起きる状況を見つける技術の開発にも取り組んできました。自動運転の信頼性を高めるには、他車や歩行者の周辺状況などを踏まえ、自車が進行すべき方向や速度を更新し続ける機能(経路計画と呼ばれます)が非常に重要となります。この機能では、他車や歩行者にぶつからないという安全性はもちろんのこと、加減速や曲がり方の度合い、走行レーン遵守など複数の観点を踏まえて進行方向や速度を決めていく必要があります。
そのため、自動運転車の振る舞いに対するシミュレーターを用いた検査が盛んに行われています。シミュレーターを用いた自動運転機能のテストでは、「右折時に対向車が来る」など、考えられるシナリオを幅広く洗い出す必要があります。例えば、同じ右折時でも、対向車を通り過ぎるのを待ってから右折するのか、対向車が来る前に加速して曲がるのかなど、非常に多様な交通状況で、自動運転機能がとりうる振る舞いにより重大な問題が発生しないか、しっかりと検査しなければなりません。ここでの問題とは、事故が起きる状況はもちろんのこと、快適さを損なうような急加速や急ハンドル、スムーズな通行を妨げる過度な低速走行など、複数の観点を考える必要があります。しかし、交差点右折などの一つのシナリオにおいて、他車の配置などのシミュレーション設定には非常に膨大な可能性があります。人が事故を想定して設定を行ってみたり、ランダムな設定を多数生成したりしても、ほとんどの場合、問題が発生するようなシミュレーション設定を検出できません。特に「あまりにも強い加速と急ハンドルが同時に発生する」など、複数種類の問題が複合的に発生することで重大な状況に至るシミュレーション設定を見つけるのは困難です。加えて、追い越しをするシナリオでは横方向への急な移動は発生しないなど、本質的に起こりえない現象もあります。このため、「追い越しのシナリオで横方向の強すぎる加速を起こしてみよう」、「右折のシナリオで速度超過を起こしてみよう」といったように、シナリオごとにそれぞれむやみにすべて問題の可能性を探索しても、無駄にシミュレーション回数が膨大になってしまうことになります。
【研究手法・成果】
本研究では、特定の問題が起こる可能性が低い場合は、そのことを見抜きつつ、「あまりにも強い加速」や「衝突あるいは衝突に近い状況」といった問題、さらにはそれら複数の問題(現実に起こる可能性が高い問題)を引き起こすようなシミュレーション設定を効率よく検出する技術の開発に取り組みました。これにより、これまでの研究に対してさらに、より重要なテストを効率よく見つけることを可能にしたと言えます。
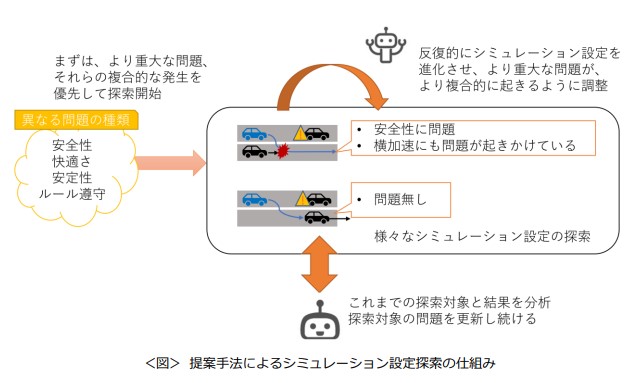
基本的なアプローチとして、進化計算と呼ばれる最適化技術を用いることにより、シミュレーションの試行を繰り返し、探索の目的となっている問題が起きるようにシミュレーション設定を調節していきます。本研究のポイントは、この探索に対する目的設定を、探索結果を踏まえて自動で随時設定し直しながら探索を反復することで、問題が複合的に起きるなどのより重大な状況を効率よく検出する点にあります。
まず対象システムにとって最も重大な問題から探索を始めます。衝突が起きる状況、さらにはそれに速度超過や急ハンドルも複合的に関わる状況を最も重大と考え、それらの状況に至るシミュレーション設定の探索から始めます。ある程度の探索を行ったところで、探索の目標設定に対する見直しを行います。その際には、まだ探索を試みていない問題も重視しつつ、これまでの探索結果を踏まえて、起こりうる重大な問題を探索するように探索の目的を再設定します。具体的には、十分探索したにもかかわらず特定の問題が見つからなかった場合、その種類の問題については探索の優先度を下げます。一方で、これまで探索をそれほど試みていない問題や、これまでに検出した状況に近いがより重大な問題の可能性が考えられる場合については、優先度を上げて探索していきます。このように目的の見直しを随時行っていくことにより、追い越しや右折などの対象シナリオの性質をとらえることができるようになり、
そのシナリオでは起こりえない種類の問題を生成しようとして無駄な計算に時間を割くことがなくなりました。それにともない、「あまりにも強い加速」や「衝突あるいは衝突に近い状況」といった問題が複合的に起きるようなより重大な状況を、効率的にシミュレーションから検出できるようになりました。
本研究のテスト生成技術は、マツダ株式会社から提供された経路計画プログラムに対して適用し、シミュレーションで実証しました。今回開発した技術により、効率よく、複数種類の問題が複合的に発生するなど重大な問題に対するシミュレーション設定を得ることに成功しました。
【今後の展望】
今までに ERATO MMSD プロジェクトが取り組んできた技術は、安全性や「良い」運転の基準の決め方など、各自動車会社のニーズや適用環境に合わせて広く利用できる技術となっています。例えば安全性評価に関する特定の基準として、各シナリオで自動運転車の挙動が満たすべき責務を定めた RSS(Responsibility-Sensitive Safety)の枠組み(インテル社による策定事例など)に技術を適合・準拠させることも可能です。今後は、国際的な標準化動向や各自動車会社のニーズを踏まえて、安全性の評価観点や適用環境に応じたカスタマイズを通して技術を具体化し、広く応用例として展開していきたいと考えています。